Last month, engineers at Georgia Institute of Technology unveiled a creepy, crawly centipede-inspired robot sporting a plethora of tiny legs. The multitude of extra limbs wasn’t simply meant to pay homage to the arthropods, but rather to improve the robot’s maneuverability across difficult terrains while simultaneously reducing the number of complicated sensor systems. Not to be outdone, a separate team of researchers at Japan just showed off their own biomimetic “myriapod” robot which leverages natural environmental instabilities to move in curved motions, thus reducing its computational and energy requirements.
[Related: To build a better crawly robot, add legs—lots of legs.]
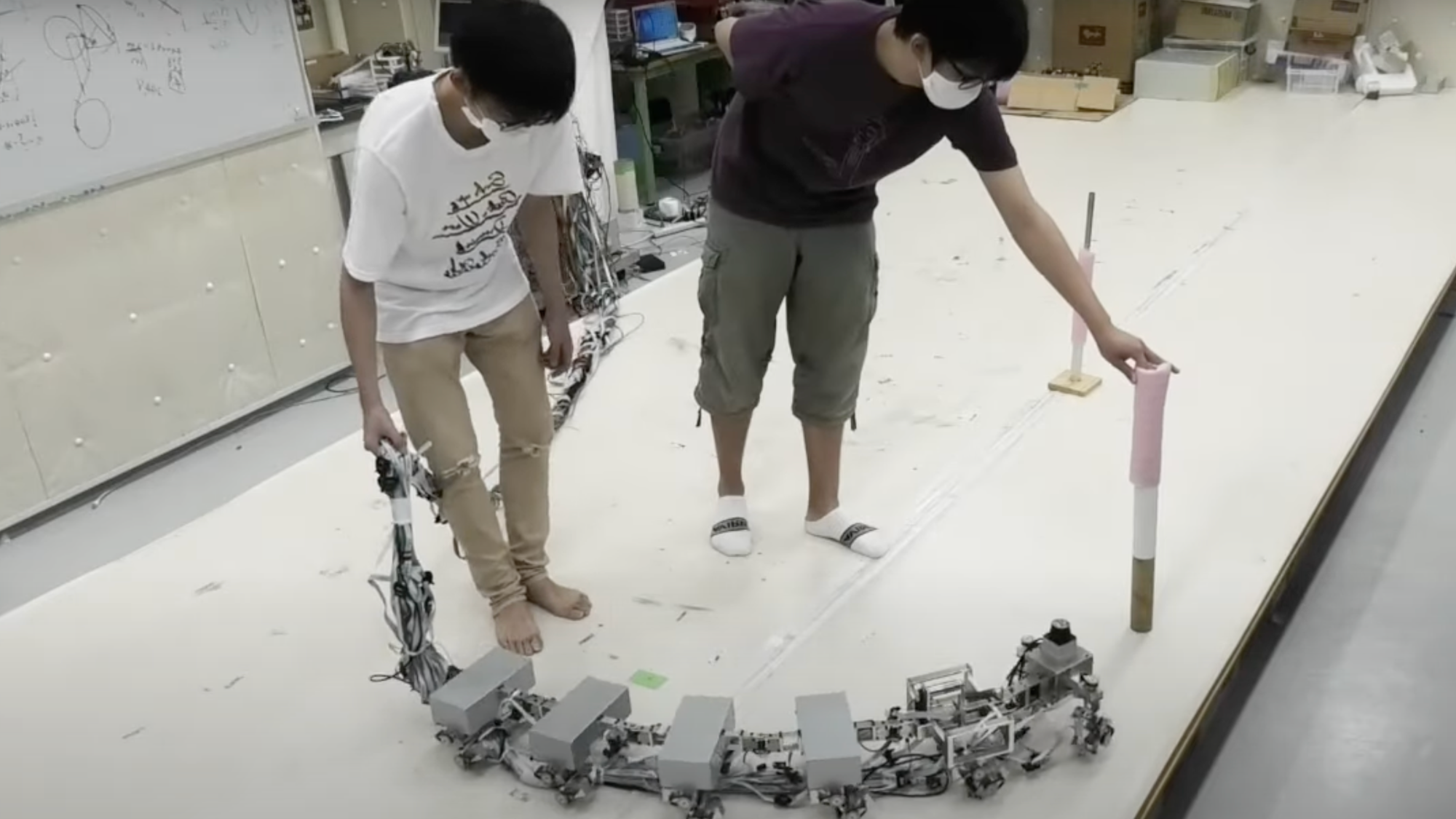
As detailed in an article published in Soft Robotics, a team at Osaka University’s Mechanical Science and Bioengineering department recently created a 53-inch-long robot composed of six segments, each sporting two legs alongside agile joints. In a statement released earlier this week, study co-author Shinya Aoi explained their team was inspired by certain “extremely agile” insects able to utilize their own dynamic instability to quickly change movement and direction. To mimic its natural counterparts, the robot included tiny motors that controlled an adjustable screw to increase or decrease each segment’s flexibility while in motion. This leads to what’s known as “pitchfork bifurcation.” Basically, the forward-moving centipede robot becomes unstable.

But instead of tipping over or stopping, the robot can employ that bifurcation to begin moving in curved patterns to the left or right, depending on the circumstances. Taking advantage of this momentum allowed the team to control their robot extremely efficiently, and with much less computational complexity than other walking bots.
As impressive as many bipedal robots now are, their two legs can often prove extremely fragile and susceptible to failure. What’s more, losing control of one of those limbs can easily render the machine inoperable. Increasing the number of limbs a lá a centipede robot, creates system redundancies that also expand the terrains it can handle. “We can foresee applications in a wide variety of scenarios, such as search and rescue, working in hazardous environments or exploration on other planets,” explained Mau Adachi, one of the paper’s other co-authors.
[Related: NASA hopes its snake robot can search for alien life on Saturn’s moon Enceladus.]
Such serpentine robots are attracting the attention of numerous researchers across the world. Last month, NASA announced the latest advancements on its Exobiology Extant Life Surveyor (EELS), a snake-bot intended to potentially one day search Saturn’s icy moon Enceladus for signs of extraterrestrial life. Although EELS utilizes a slithering movement via “rotating propulsion units,” it’s not hard to envision it doing so alongside a “myriapod” partner—an image that’s as cute as it is exciting.
